Northrop Grumman Autonomous Rescue Drone
The Northrop Grumman Collaboration Project (NGCP) is an ongoing sponsored research project that aims to create a swarm of autonomous aerial (UAV), ground (UGV), and underwater (UUV) drones capable of performing search and rescue missions.
I joined the UGV team in 2015 and my contributions led to me serving as the mechanical engineering lead of 8 members the following year. I had ambitious plans for the project, and together, we accomplished the largest series of hardware upgrades to the UGV since its creation.
Learning Experiences & Challenges
Team Leadership
In one instance, a team member was struggling to keep pace in his work. I chose to approach him with compassion and understanding, which led to him to confide this inexperience with Solidworks. We worked together to figure out a learning strategy, which included pairing him with a seasoned colleague for mentorship. This experience underscored the value of empathy and support in leadership, culminating in his transformation into one of our most dedicated team members.
I believe the greatest challenge as a lead is not necessarily in actual engineering challenges, but rather in being able to effectively plan and create action within your team to achieve your goal. This project offered a lot of opportunities, both from my mentors and through the project, to grow in my leadership skills in the context of large hierarchical teams. While I had overarching project goals and timelines I had to meet, it was clear to me that my team was the most important resource I had. I made an effort early to get to know my team’s background, along with their own personal goals and interests.
Keep it Simple! (if possible)
Early in the project, we experienced a challenge with our accessory platform - the standoffs in the UGV were never designed to carry a robotic arm, and dynamic loading caused the platform to wobble. Our team explored various solutions, from custom-machined standoffs to 3D-printed reinforcements. However, I proposed that before we fabricated any designs, that we try a simpler, seemingly unconventional approach: off the shelf washers. Despite initial skepticism, this cost-effective and quick solution resolved our stability problems and freed up our resources to tackle other problems.
During the conceptional stages of R&D, it’s very easy for engineers come up with overly complex designs. I want to stress that although this is a vital and necessary part of the R&D process, it was important for me as a lead to evaluate the risks, resources required, lead times, and actual value added to the project. As we went through the R&D phases multiple times, we often found
Platforms Upgrade
Overview
One of the top priorities we identified was to modularize the platform. We found that individual subsystem teams were dependent both progress and physical access to equipment installed on the UGV. Additionally, wiring was originally point-to-point, which made it difficult for us to scale the design. With this in mind, I worked with the electrical hardware lead to streamline our workflow.
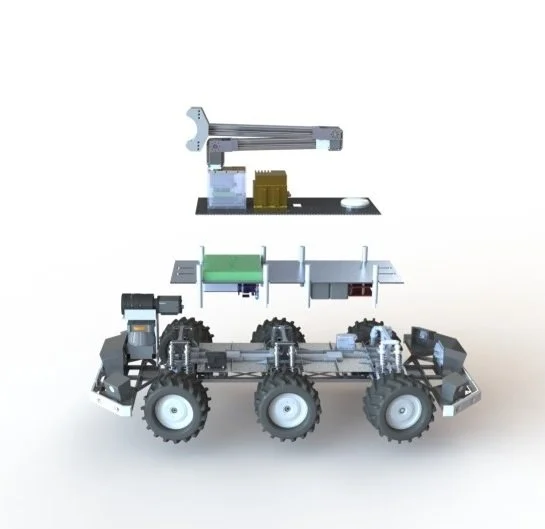
The UGV was then restructured into three platforms with their own upgrades:
-
Consisting of the chassis, wheels, motors, and power systems. This platform was capable of operating completely independently of the all other systems, allowing the mechanical engineering team to make and test physical modifications to the platform. Additionally, the suspension had to be upgraded to handle the increased load of the robotic arm. I was able to use my experience from a previous internship to design and procure a custom spring for our suspension.
-
This aluminum pegboard platform was completely re-designed and fabricated by our team to expand the UGV’s electronics suite. ESD and heat sensitive electronics are placed above the plate, with less sensitive electronics placed below. Additionally, we moved our wiring to centralized wiring channels for organizationDescription text goes here
-
A new carbon fiber platform (which I personally fabricated), that supports a new robotic arm (the primary focus of the mechanical engineering team), along with with a military grade IMU and various antennas.

Robotic Arm
This addition to the UGV was intensively designed from the ground up. Read the full article here.
Date: June 2016 - 2017