NGCP - Robotic Arm / End Effector

Introduction
In 2016, Northrop Grumman imposed a new mission objective: In addition to autonomously locating the payload, the UGV would now autonomously pick up and retrieve said payload.
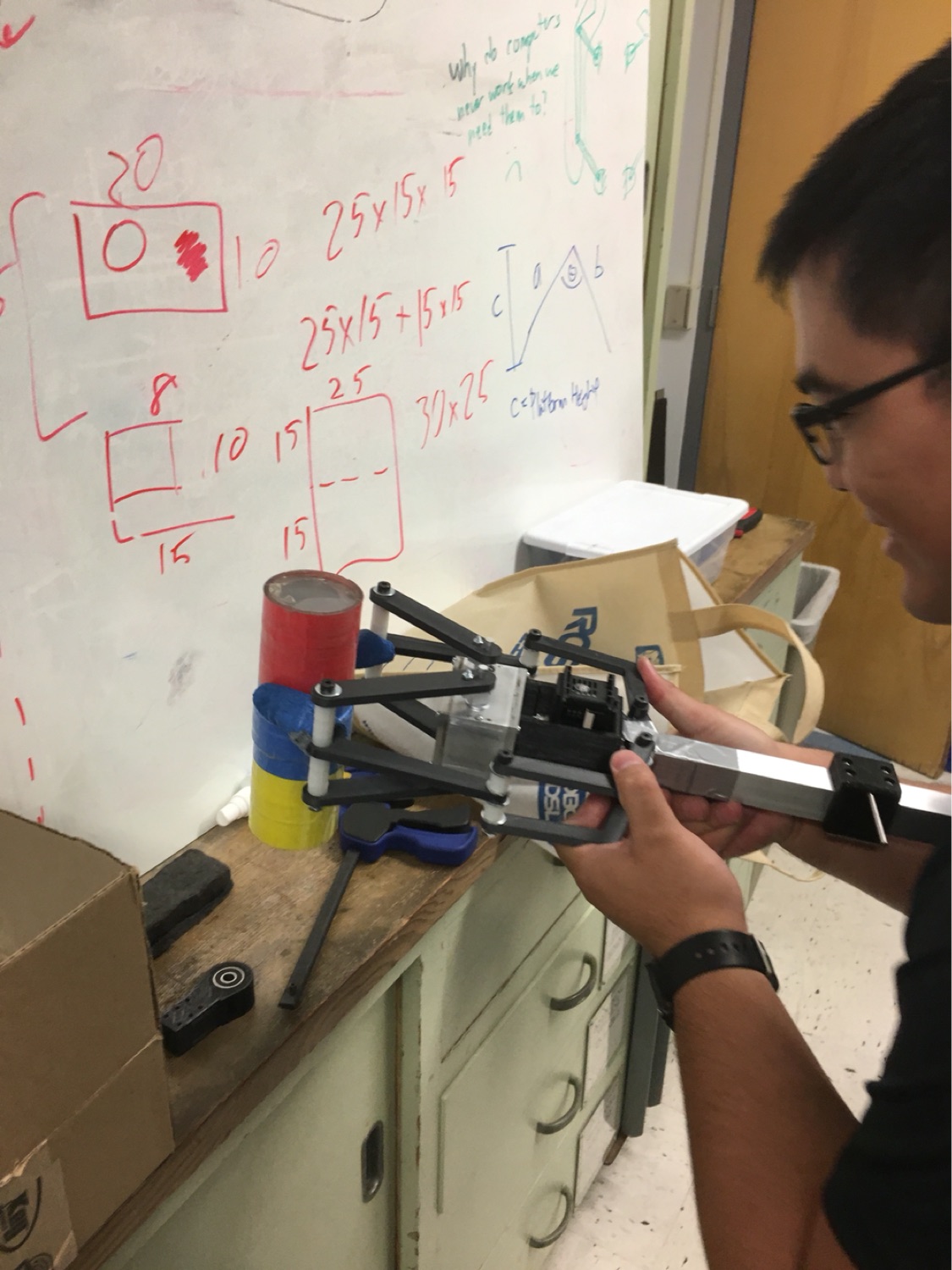
As a result, the NGCP mechanical team, created a 5-DoF, articulated robotic arm equipped for autonomous operation.
Mechanical Constraints
Due to the weight, power, and costs limitation of the UGV, special care was given to the mechanical systems of the robotic arm. We undertook the challenge of picking up a 1.5lb payload from 3 feet away, using only small servos.